

摘要:,,本文分析了光学摄像器材与机器人驱动方式的优缺点,并探讨了持久性执行策略。光学摄像器材具有高分辨率、色彩还原度高等优点,但成本较高且对环境条件有一定要求。机器人驱动方式则具有灵活性和自动化程度高的优势,但精度和稳定性可能受到某些限制。持久性执行策略对于经典款37.48.49型号产品而言,着重于提高性能和延长使用寿命,以确保长期稳定运行。本文旨在帮助读者全面了解这些技术细节,以便做出更明智的决策。
本文目录导读:
随着科技的飞速发展,光学摄像器材与机器人技术已经深入到各个领域,为我们的生活带来极大的便利,光学摄像器材以其高精度的成像技术,广泛应用于摄影、监控、科研等领域,而机器人技术则以其灵活的驱动方式,广泛应用于工业、医疗、军事、服务等领域,本文将重点探讨光学摄像器材与机器人三种驱动方式的优缺点。
光学摄像器材
光学摄像器材主要包括照相机、摄像机、监控摄像头等,其核心技术是成像技术,光学摄像器材的优缺点主要表现在以下几个方面:
1、优点
(1)高精度成像:现代光学摄像器材采用了先进的成像技术,如数码单反相机的高分辨率镜头和图像传感器,能够捕捉到非常细腻的画面细节。
(2)广泛的适用范围:从摄影到监控,从科研到艺术,光学摄像器材的应用范围非常广泛。
(3)便捷的操作:随着技术的发展,现代光学摄像器材越来越智能化,操作更加便捷。
2、缺点
(1)成本较高:高端的光学摄像器材,如专业相机和摄像机,其成本较高,不利于普及。
(2)对环境要求较高:如摄影需要良好的光线条件,监控摄像头需要良好的视野等。
机器人的三种驱动方式
机器人的驱动方式主要有电力驱动、液压驱动和气动驱动三种,其优缺点如下:
1、电力驱动
(1)优点:电力驱动具有环保、易于控制、精度高、维护简单等特点,现代机器人大多采用电力驱动,特别是电动伺服系统和步进电机,广泛应用于各种机器人中。

(2)缺点:电力驱动的扭矩相对较小,对于需要大扭矩的应用场景,可能需要复杂的传动机构。
2、液压驱动
(1)优点:液压驱动具有功率大、扭矩大、响应速度快等优点,适用于重型设备的操作。
(2)缺点:液压驱动系统复杂,需要专门的液压油路和油液维护,且存在泄露和污染问题。
3、气动驱动
(1)优点:气动驱动具有成本低、响应速度快、维护简单等优点,在一些对精度要求不高的场合,气动驱动是一种很好的选择。
(2)缺点:气动驱动的力度较小,难以实现精确控制,且排气可能会产生噪音。
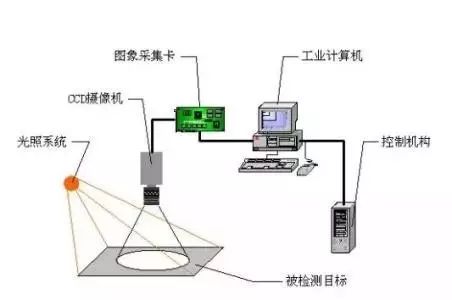
光学摄像器材与机器人驱动方式的关联
光学摄像器材和机器人的发展是相辅相成的,高精度的光学摄像器材可以为机器人提供精确的视觉感知;灵活的驱动方式可以使机器人在复杂环境中实现精确的操作,在工业自动化领域,电力驱动的机器人配合高精度的光学摄像器材,可以实现精确的装配和检测,在军事领域,气动或液压驱动的特种机器人可以适应复杂的环境,配合光学摄像器材进行侦查和作战。
光学摄像器材和机器人的驱动方式都有其独特的优缺点,我们在选择和应用时,需要根据实际的需求和场景进行权衡和选择,随着科技的进步,我们期待这些技术能够在未来得到进一步的发展和完善。
 京公网安备11000000000001号
京公网安备11000000000001号 京ICP备11000001号
京ICP备11000001号
还没有评论,来说两句吧...