

摘要:坡口机器人程序编程是自动化焊接技术的核心要素之一。通过精确编程,坡口机器人能够实现高效、精确的焊接作业,提高生产效率和焊接质量。坡口机器人编程涉及路径规划、参数设置等关键技术,以确保焊接过程的稳定性和可靠性。自动化焊接技术的应用,将进一步推动焊接行业的智能化和现代化发展。
本文目录导读:
随着工业自动化的快速发展,坡口机器人程序编程在焊接领域的应用越来越广泛,坡口机器人是一种高精度的自动化焊接设备,通过先进的程序编程技术,实现对金属接合处的精确焊接,本文将详细介绍坡口机器人程序编程的相关知识,包括编程原理、关键技术、实施步骤及优化策略等。
坡口机器人程序编程原理
坡口机器人程序编程主要基于工业机器人技术和焊接工艺原理,通过编程软件,将焊接工艺要求转化为机器人的运动轨迹和焊接参数,编程过程中,需要考虑到金属材料的特性、坡口的角度、焊缝的位置等因素,以确保焊接质量和效率。
坡口机器人程序编程的关键技术
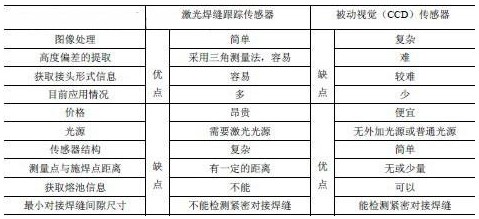
1、传感器技术:传感器在坡口机器人中发挥着重要作用,用于实时感知焊缝的位置、形状和尺寸等信息,这些信息将作为编程的重要依据,确保机器人精确执行焊接任务。
2、运动控制技术:运动控制技术是坡口机器人程序编程的核心,通过精确控制机器人的运动轨迹和速度,实现高精度的焊接。
3、焊接参数控制:根据焊接材料和工艺要求,合理设置焊接电流、电压、焊接速度等参数,以确保焊接质量和效率。
坡口机器人程序编程的实施步骤
1、需求分析:明确焊接任务的具体要求,包括金属材料、坡口角度、焊缝位置等。

2、设备选型:根据需求选择合适的坡口机器人及配件,如焊接电源、传感器等。
3、环境搭建:搭建适合坡口机器人工作的环境,包括工作平台、防护设施等。
4、编程软件选择:选择合适的编程软件,根据焊接任务进行程序编写。
5、程序编写:根据需求分析和设备特性,编写机器人的运动轨迹和焊接参数。
6、调试与优化:在实际环境中进行调试,根据实际效果对程序进行优化,提高焊接质量和效率。
坡口机器人程序编程的优化策略
1、持续优化算法:通过改进机器人的运动控制算法和焊接参数调整算法,提高焊接质量和效率。
2、深度学习技术:利用深度学习技术,使机器人具备自主学习和适应环境的能力,提高坡口机器人的智能化水平。
3、人机协作:加强人机协作,让熟练工人与机器人共同完成任务,提高生产效率和产品质量。
4、维护保养:定期对坡口机器人进行维护保养,确保设备的稳定性和可靠性。
坡口机器人程序编程是自动化焊接技术的核心要素,对于提高焊接质量和效率具有重要意义,通过掌握坡口机器人程序编程的原理、关键技术、实施步骤及优化策略,可以更好地应用坡口机器人完成各种焊接任务,随着技术的不断发展,坡口机器人将在更多领域得到广泛应用,为工业自动化的发展做出更大贡献。
1、加强人才培养:加大对坡口机器人编程技术的人才培养力度,培养更多具备专业技能的高素质人才。
2、深化技术研发:继续深化坡口机器人编程技术的研发,提高机器人的智能化水平和适应性。
3、推广应用:积极推广坡口机器人在各个领域的应用,提高生产效率和产品质量,促进工业自动化的发展。
 京公网安备11000000000001号
京公网安备11000000000001号 京ICP备11000001号
京ICP备11000001号
还没有评论,来说两句吧...