
摘要:尺蠖机器人是一种基于尺蠖运动原理设计的机器人,其结构简图包括驱动部分、传动部分和行走部分。设计原理主要是通过模拟尺蠖的爬行方式,利用连续的弯曲运动实现机器人的移动。该机器人结构简单,移动灵活,适用于狭小空间的工作场景。
本文目录导读:
尺蠖机器人是一种模拟尺蠖动物运动原理的仿生机器人,具有高效、灵活的移动能力,本文将详细介绍尺蠖机器人的结构简图及其设计原理,包括机械结构、控制系统、驱动方式等方面,为读者提供一个全面的了解尺蠖机器人的视角。
尺蠖机器人结构简图
尺蠖机器人主要由三部分组成:身体、腿部和驱动系统,下面是一个简单的尺蠖机器人结构简图:
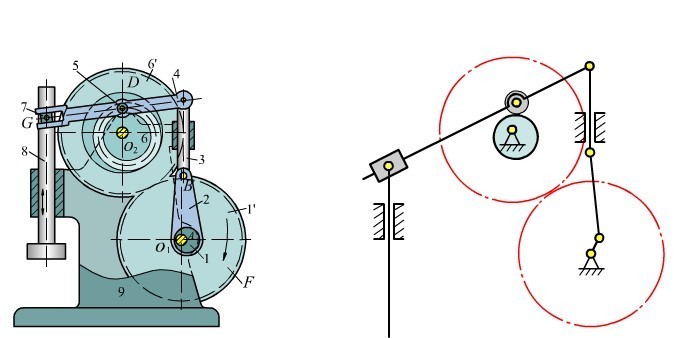
(请在此处插入尺蠖机器人结构简图)
1、身体
尺蠖机器人的身体是整体结构的基座,通常采用轻质、高强度的材料制成,如碳纤维复合材料,身体内部包含电路板、电池等核心部件,以及为腿部提供动力的驱动系统。
2、腿部
尺蠖机器人的腿部是其移动的关键部分,通常采用多关节设计,以模拟尺蠖动物的爬行运动,每条腿部包含多个关节和驱动器,通过控制信号的输入实现精确的运动控制。
3、驱动系统
驱动系统是尺蠖机器人的动力来源,负责为腿部提供动力,常见的驱动方式包括电动驱动、液压驱动等,电动驱动具有结构简单、控制方便等优点,而液压驱动则具有较大的输出力矩和响应速度。
尺蠖机器人的设计原理
尺蠖机器人的设计原理主要包括机械结构设计和控制系统设计两个方面。
1、机械结构设计
机械结构设计是尺蠖机器人的基础,要求实现高效、灵活的移动能力,设计时需考虑身体与腿部的协调运动,以及腿部多关节的精确控制,通过优化结构设计,可以提高尺蠖机器人的运动性能和稳定性。
2、控制系统设计
控制系统是尺蠖机器人的核心,负责实现机器人的运动控制和功能实现,控制系统通常包括主控板、传感器、驱动器等部分,主控板负责接收指令并控制机器人各部分的工作;传感器负责感知环境信息,为机器人提供反馈;驱动器负责为腿部提供动力,通过优化控制系统设计,可以实现尺蠖机器人的精确运动控制和智能行为。
尺蠖机器人的驱动方式
尺蠖机器人的驱动方式对其运动性能具有重要影响,常见的驱动方式包括电动驱动、液压驱动等。
1、电动驱动
电动驱动是尺蠖机器人常用的驱动方式,具有结构简单、控制方便等优点,电动驱动器通过电机带动腿部运动,实现精确的运动控制。
2、液压驱动
液压驱动具有较大的输出力矩和响应速度,适用于需要大力和快速运动的尺蠖机器人,液压驱动器通过液压油缸带动腿部运动,实现高效、有力的运动。
尺蠖机器人的应用领域
尺蠖机器人因其高效、灵活的移动能力,在诸多领域具有广泛的应用前景。
1、工业生产
尺蠖机器人在工业生产中可应用于物料搬运、生产线自动化等领域,其高效、灵活的运动能力可大大提高生产效率。
2、医疗服务
尺蠖机器人在医疗服务领域可应用于微创手术、康复辅助等领域,其精确的运动控制和智能行为可为医生提供有力的辅助。
3、探险救援
尺蠖机器人在探险救援领域可应用于复杂环境的探测和救援工作,其高效、灵活的移动能力可在狭窄、复杂的环境中发挥重要作用。
4、其他领域
尺蠖机器人还可应用于军事、农业、林业等领域,其广泛的应用前景将为人类社会带来诸多便利。
本文详细介绍了尺蠖机器人的结构简图及其设计原理,包括机械结构、控制系统、驱动方式等方面,尺蠖机器人作为一种高效、灵活的仿生机器人,在诸多领域具有广泛的应用前景,通过不断优化设计,提高尺蠖机器人的运动性能和智能行为,将为人类社会带来诸多便利。
 京公网安备11000000000001号
京公网安备11000000000001号 京ICP备11000001号
京ICP备11000001号